

при половине за бугром ломает пиксиля. Зайди треню поставь противника за холмик боком. Сделай так что бы прицел целил ПИКСЕЛЬ корпуса. И постреляй раз 10 потом скажешь сколько попало. Потом сделай так что бы прицел целил башню. Потом скажешь сколько раз попало с результатом. Больше я отвечать тебе не буду хоть упишись уписись))многа букв
настройка конфига
т95 авто выстрел по кд
ис4 по кд растояние 250-300м
если по дичи накрутить то и получите на выходе
при половине за бугром ломает пиксиля
за домом только каток на пробитие идет дамаг
слова пустые фактов нема
видео в студию
Обсуждение Платная сборка модпак от zorrojan - книга жалоб и предложений

был режим где 100% сведение и аим и сама игра показала во всей красепри половине за бугром ломает пиксиля. Зайди треню поставь противника за холмик боком. Сделай так что бы прицел целил ПИКСЕЛЬ корпуса. И постреляй раз 10 потом скажешь сколько попало. Потом сделай так что бы прицел целил башню. Потом скажешь сколько раз попало с результатом. Больше я отвечать тебе не буду хоть упишись уписись))
даже на бз 58-2 7к по кд на изи причем 2 фугаса тоже вошло в слабую точку
рандом того же минотавра все тупят если полностью то нлд если башня бьет в пиксель два выстрела и все пт просто убегает от своей беспомощности
не стоит пенять на зеркало
скорость сканирования частота количество для вас всех походу неопознанная функция

Не забываем, игра динамическая. Просто тупо танк в реальном бою стоять не будет. Сейчас алгоритм работает так. Если танк движется (скорость > 0, или крутит башней, корпусом > угла в angleReset), то точки пересчитываются, т.к. количество точек ограничено и после достижения заданного количества набор точек заканчивается иначе будет огромная нагрузка и лаги. Но когда танк противника проявляет активность, точки набираются заново и выявляется новая зона. Попробуй в своём примере с тренировкой не просто целить в неактивного противника, а попросить его немного ёрзать.при половине за бугром ломает пиксиля. Зайди треню поставь противника за холмик боком. Сделай так что бы прицел целил ПИКСЕЛЬ корпуса. И постреляй раз 10 потом скажешь сколько попало. Потом сделай так что бы прицел целил башню. Потом скажешь сколько раз попало с результатом. Больше я отвечать тебе не буду хоть упишись уписись))
Параметр deltaRotatPoint
Он определяет, стоит ли переключаться на новый центр (голубая точка при включенном __visualPoints) и если расстояние от нового центра до старого места прицеливания больше указанного в этом параметре, то прицел переводится сразу, если нет, то проверяются остальные условия типа rangePercent и в зависимости от результат либо переводится, либо остаётся на старой позиции. Это необходимо, чтобы всегда было оптимальное место прицеливания. Сейчас в новой логике место прицеливания выбирается более корректно и более стабилизировано (меньше прыгает прицел)
ЗЫ
scanCycle не рекомендую больше 1, этого вполне достаточно
Если использовал ранее другие значения, то сейчас аналогично будет работать при значении раза в 3 - 5 меньше, т.к. уменьшилось время вызова алгоритма сканирования. И при старых значениях - например 10, будет лагать, как будто стоит 30-50
В общем, слишком большие значения scanCycle и pointsLimits вызывают заметные лаги
Последнее редактирование:

Здравствуйте. За поддержку . Смотрите если ростик инет плохой то дни которые логал инет вернут. триколор недавно звонил реклама уже месяц и помехи 2 месяца продлили бесплатно. человек написал поддержку и щитал дни сколько вы отвечаете . как бы сидишь час в день охота отдохнуть .За что неустойку? За то что вы неправильно указываете данные? По договору вы покупаете привязку на то что вбиваете в поля при оплате. Проверяйте вводимые данные.
Последнее редактирование:
Вы не в курсе. У человек всё это время была рабочая лицензия, просто он при продлении указал не те данные. И ему нужно было просто перекинуть платёж, но при этом он не мог даже вспомнить на какой аккаунт он заплатил. Поэтому сразу быстро в этой ситуации разобраться не получилось. И письмо в поддержку было одно и совсем по другому поводу (касалось привязки HardID). Отсюда "Трудности перевода", "Сломанный телефон" и т.п.Здравствуйте. За поддержку . Смотрите если ростик инет плохой то дни которые логал инет вернут. триколор недавно звонил реклама уже месяц и помехи 2 месяца продлили бесплатно. человек написал поддержку и щитал дни сколько вы отвечаете . как бы сидишь час в день охота отдохнуть .
ЗЫ
Я не являюсь сотрудником поддержки. Могу только посодействовать в решении проблем. Писать надо в поддержку и правильно задавать вопросы. Там тоже нагрузка большая и разбираться с непонятками, тратить время впустую не будут по объективным причинам. В первую очередь помогают тем чья ситуация понятна.
Последнее редактирование:
У человек всё это время была рабочая лицензия
Сегодня вообще попёрло.
Конфиг - дефолт.

Вложения


Последнее редактирование:

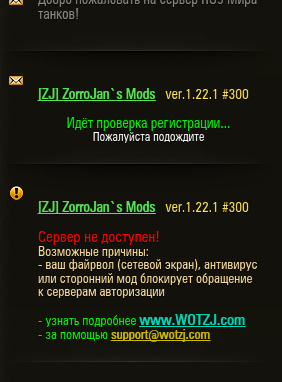
Разрешилась ли проблема?Не писал давно но вот сегодня после обновы мод не работает : "идет проверка регистрации..". Или мод не той версии или что? Я один такой?
У меня тоже самое прошли сутки и не активен. Не покупайте не работает

Последнее редактирование:
Вторые сутки не ативированно тожеУ меня тоже самое прошли сутки и не активен. Не покупайте не работает
Посмотреть вложение 56554

Until yesterday my license was renewed every 5 days, now the day counter is decreasing. Can you continue automatic renewal? Do you have any other payment method apart from Paypal and https://wl.walletone.com, because these payments don't work for me. Previously, I paid regularly for several years for the mod.
У меня тоже вторые сутки и Зорро молчит и тех поддержка молчит. че за фигня не пойму?Вторые сутки не ативированно
Не активно после оплаты у многих у меня уже вторые сутки такдобрый всем что случилось с активацией
Ну что у кого нибудь что то изменилось? у меня как был не активен так и есть .Написал зорро в личку сутки прошло ничего не ответил мод так и не активирован...Он ничего не решает и не собирался.Уже сутки прошли
Я вам ответил. Проверьте лс
Так же отвечаю в основной теме
https://4cht.com/threads/Танки-wot-...ld-022-full-аимбот-от-zorrojan.26999/page-655
Так же отвечаю в основной теме
https://4cht.com/threads/Танки-wot-...ld-022-full-аимбот-от-zorrojan.26999/page-655